Roboruka je robotická stavebnice z Robotárny (pobočka DDM Helceletova). Tato stavebnice byla poprvé uvedena na Robotickém táboře 2019.
Jedná se o všestranně využitelného robota. Vhodný do robotických soutěží (např. na Robotickém dni na soutěž Roadside Assistance). Rukou hýbají 3 serva, což jí umožňuje mít velký manipulační prostor.


Popis
Řízení
Robotická ruka je řízená pomocí naší desky RBController. Mozkem této desky je ESP32-WROOM. Deska zvládá řídit až 8 DC motorů a obsluhovat 8 enkodérů. Umí ovládat 8 modelářských serv nebo 4 inteligentní serva LX-15D . Expander přidáva možnost ovládat o 16 pinů více. Na desce je připravena ochrana proti přepólování a podvybití.


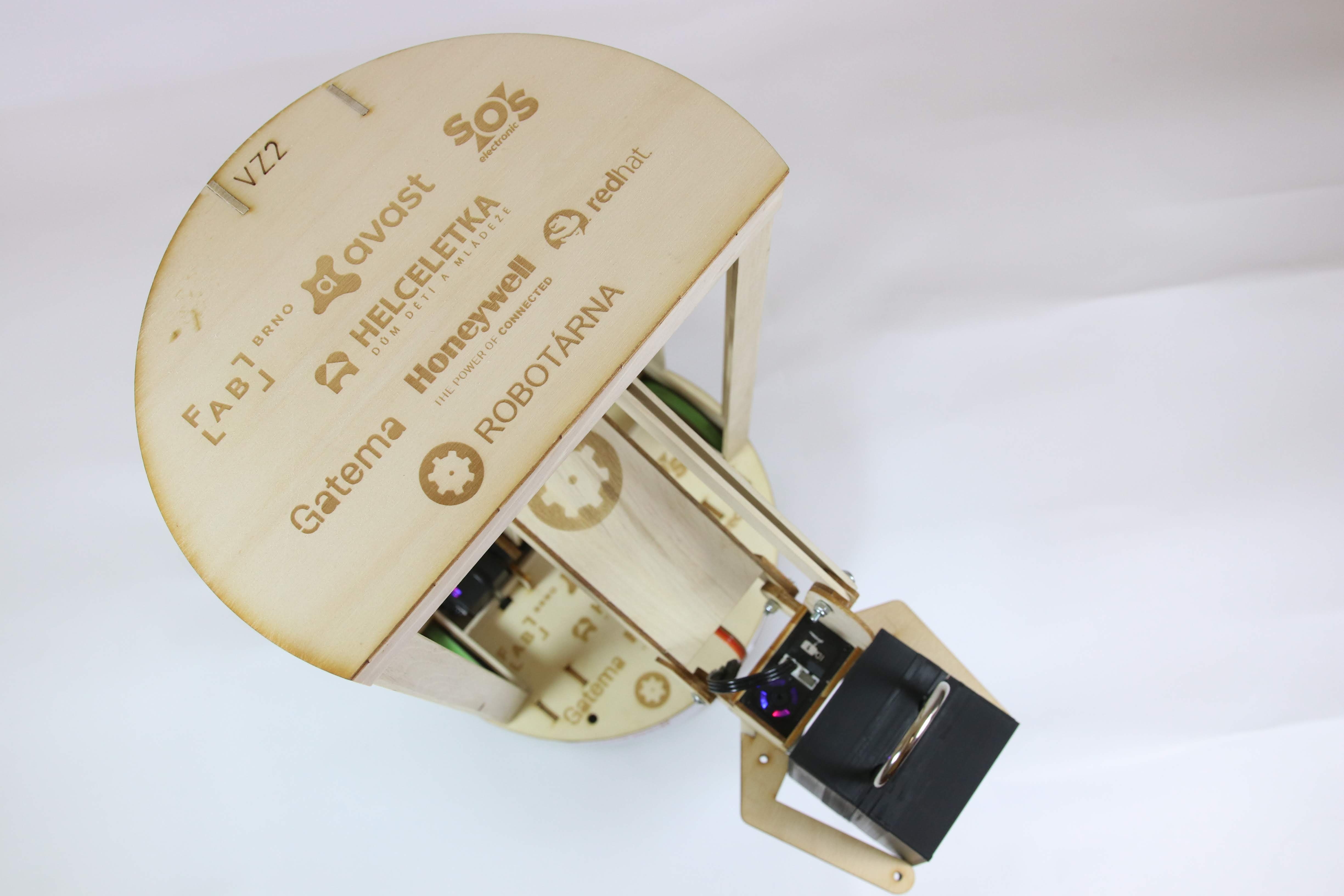
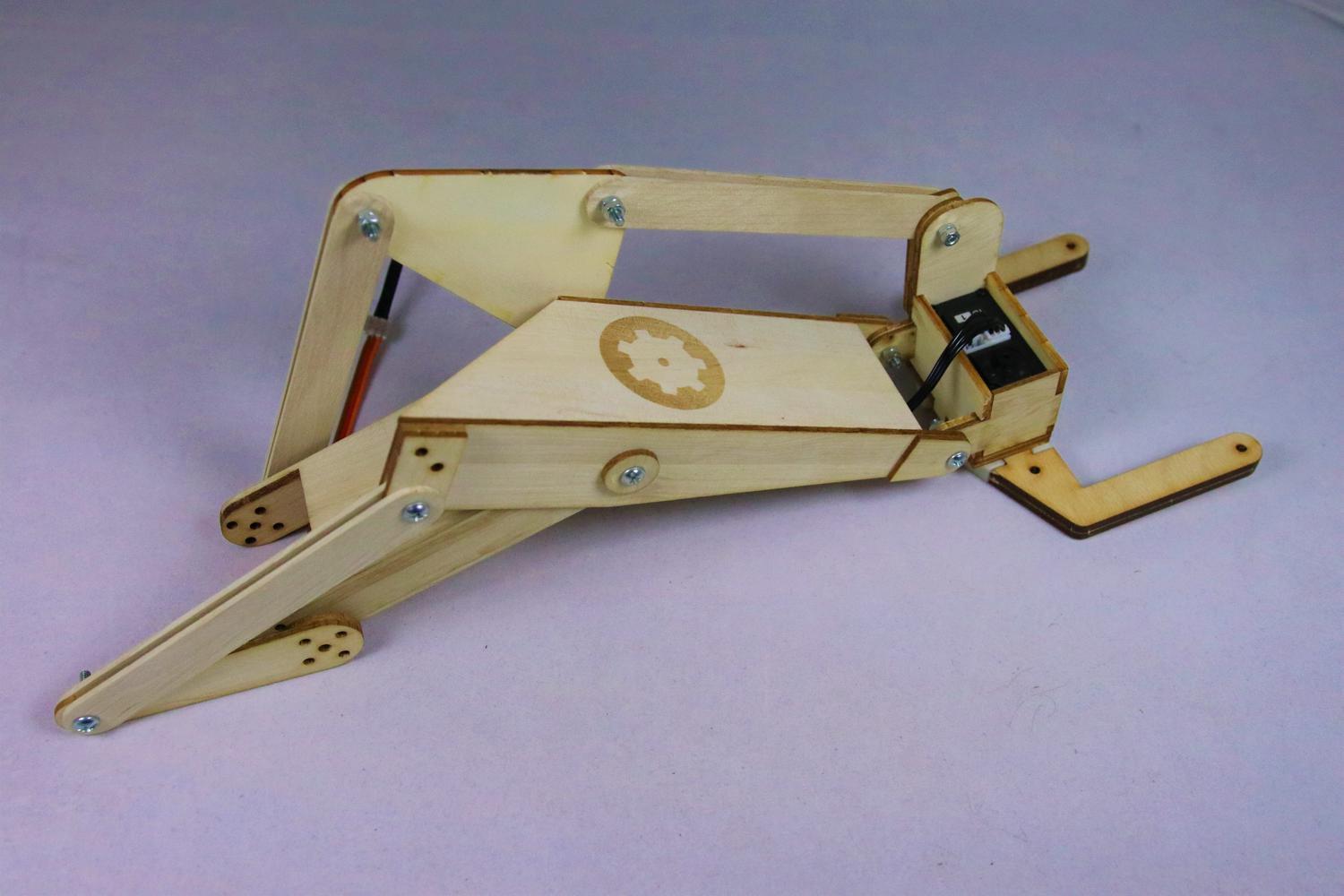
Konstrukce
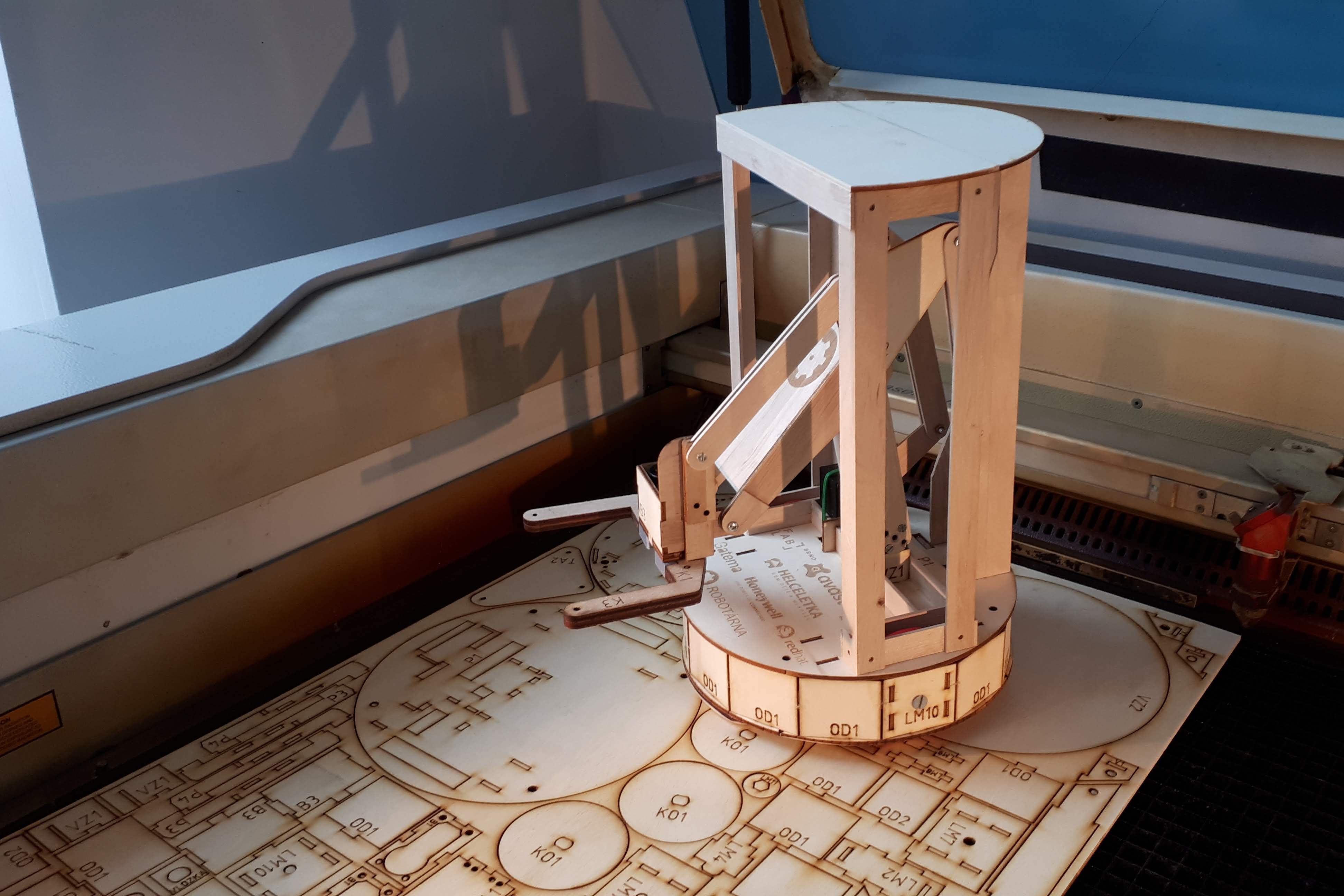
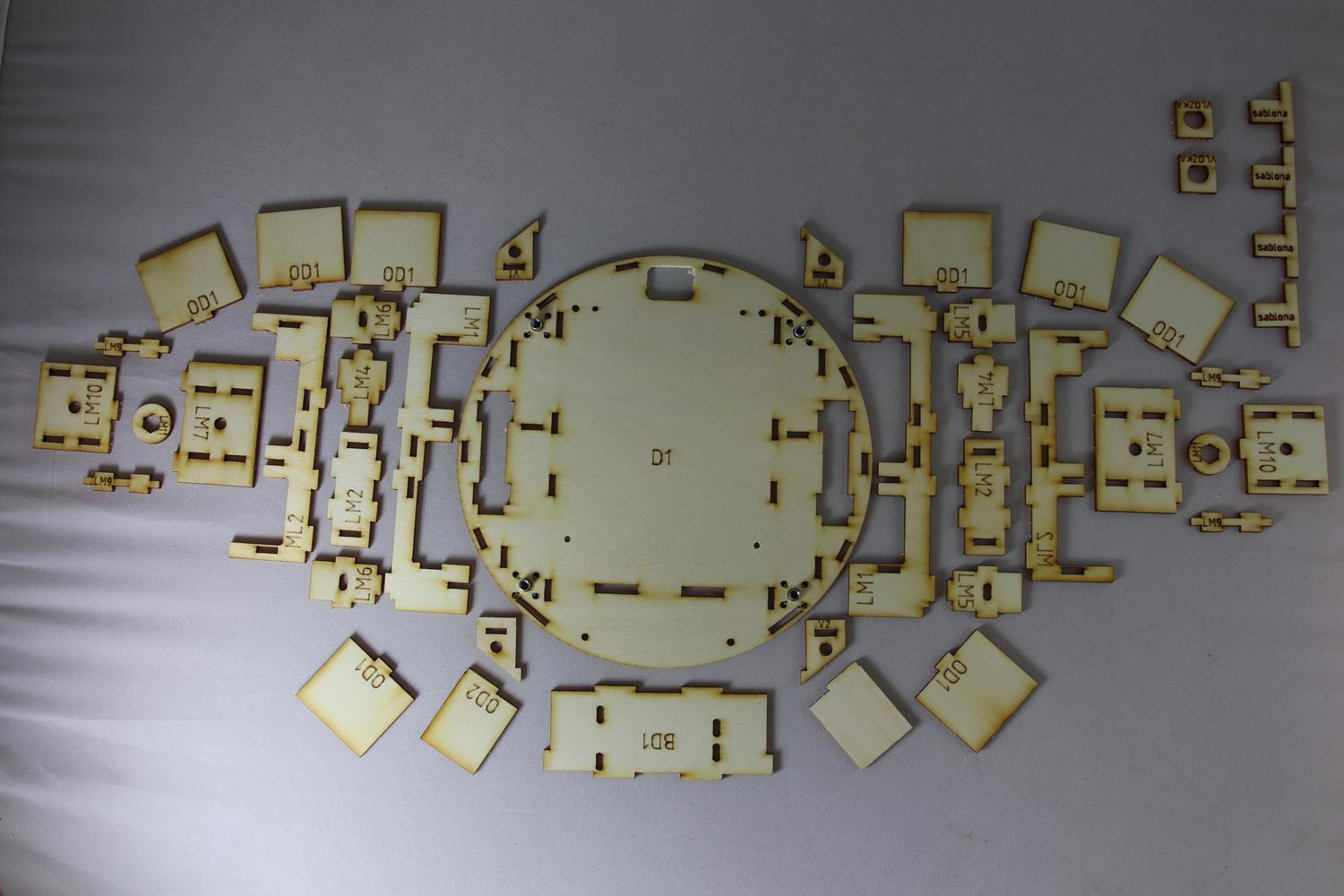
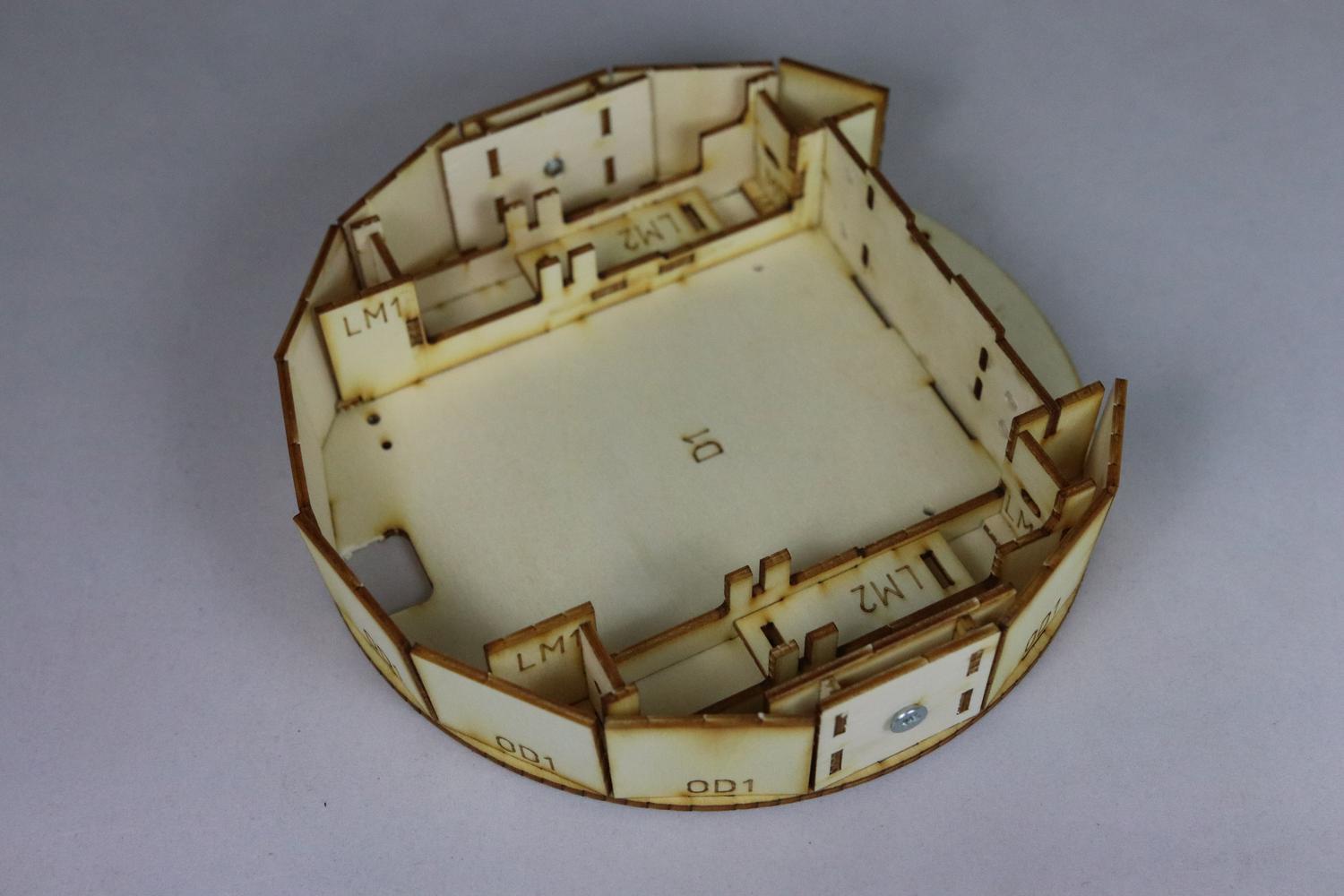
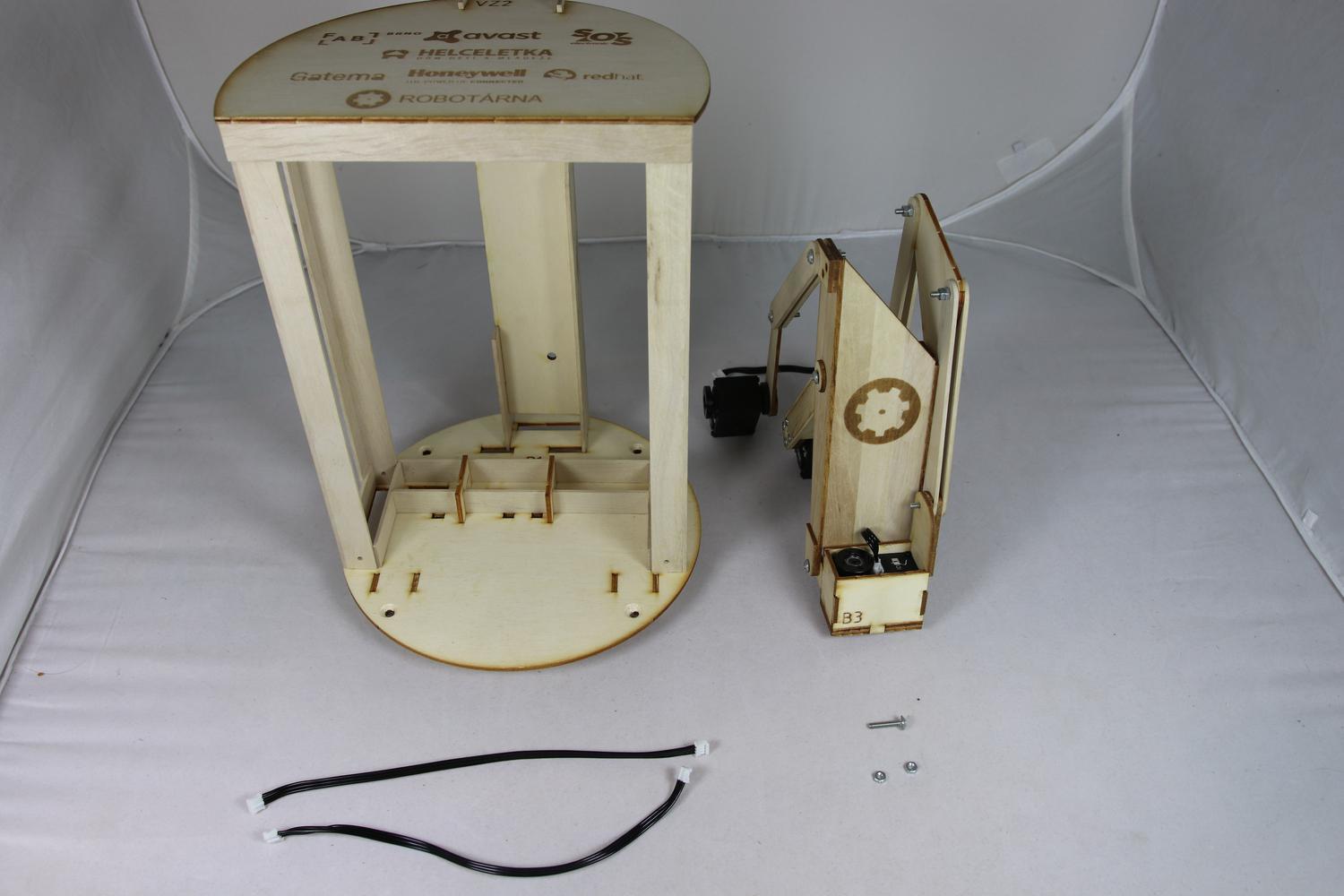
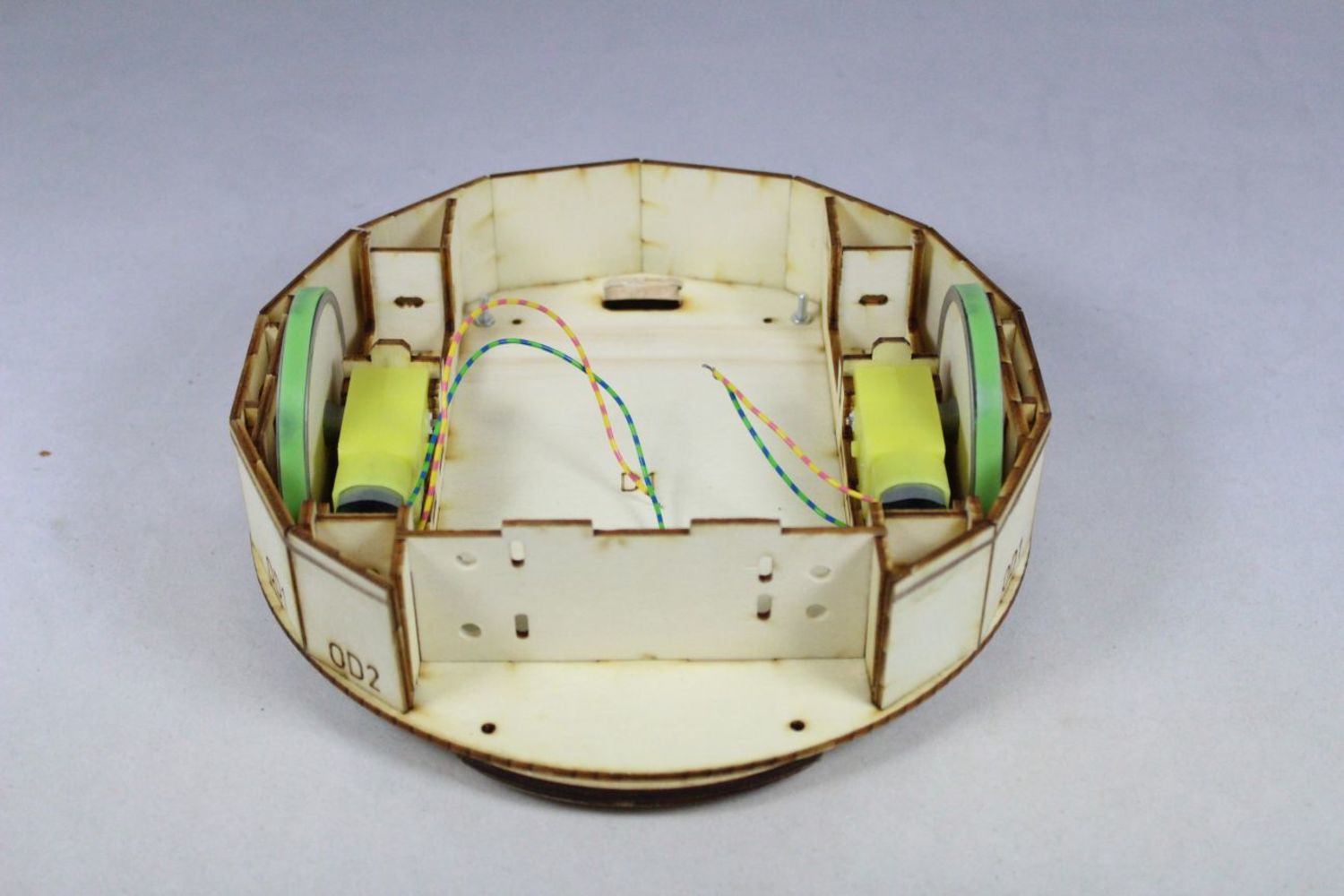
Největší část robota je vyrobená z překližky vyřezané na laseru. Podvozek je vypálený z 3 milimetrové překližky a robotická ruka s rámem je postavena z 3 mm tlustých a 16 mm širokých dřevíček, které jsme si nařezali na popřebné délky.
Pohyb
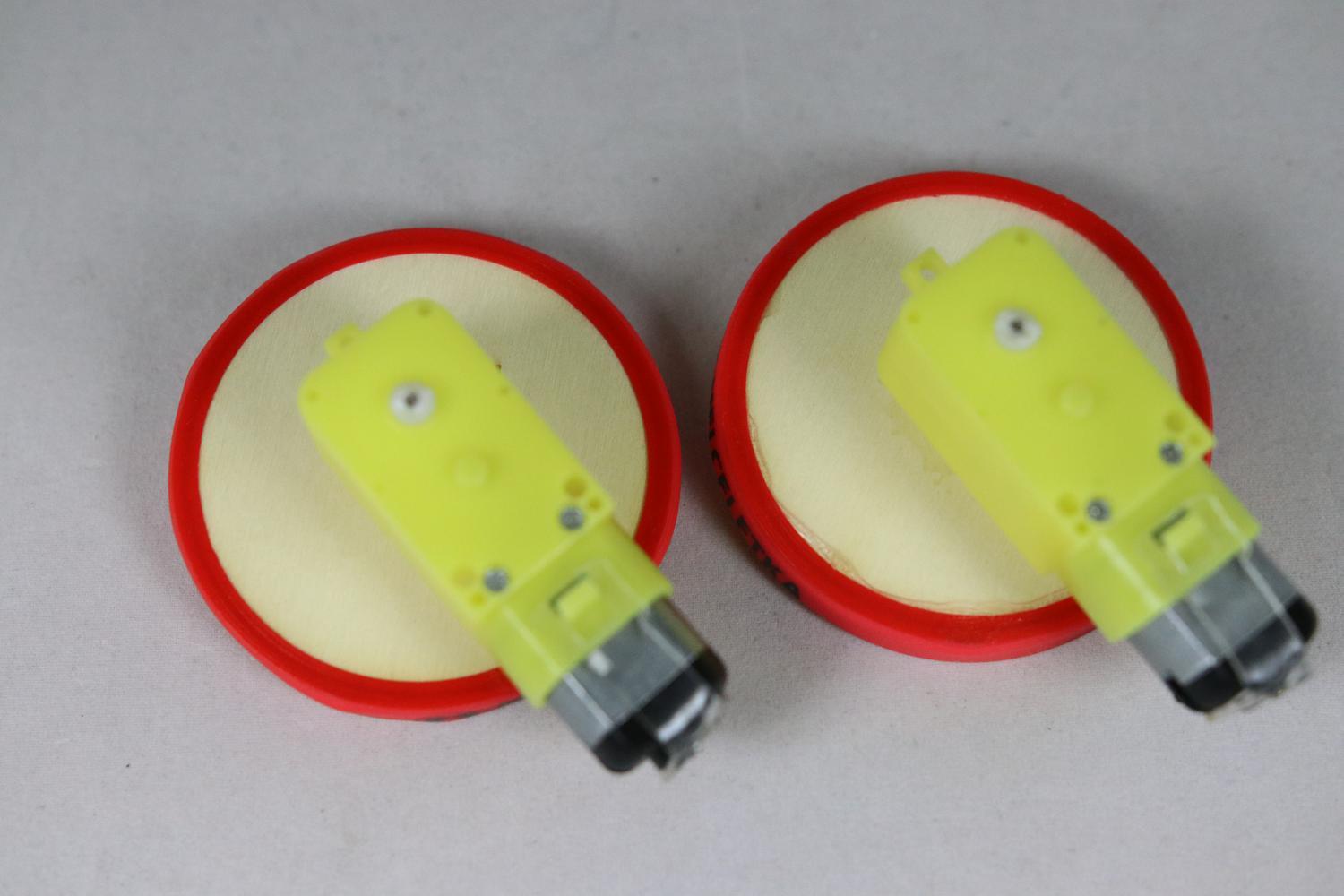
Jízdu zajišťují dva DC motory řízené RBControllerem na které jsou připojeny magnetické enkodéry. Pohyb ruky řídí 3 inteligentní serva LX-15D propojená sériově do řídící desky. Serva mají rozsah 240 stupňů, kroutící moment 17 kg/cm a dokáží vyčítat svoji pozici.
Napájeni
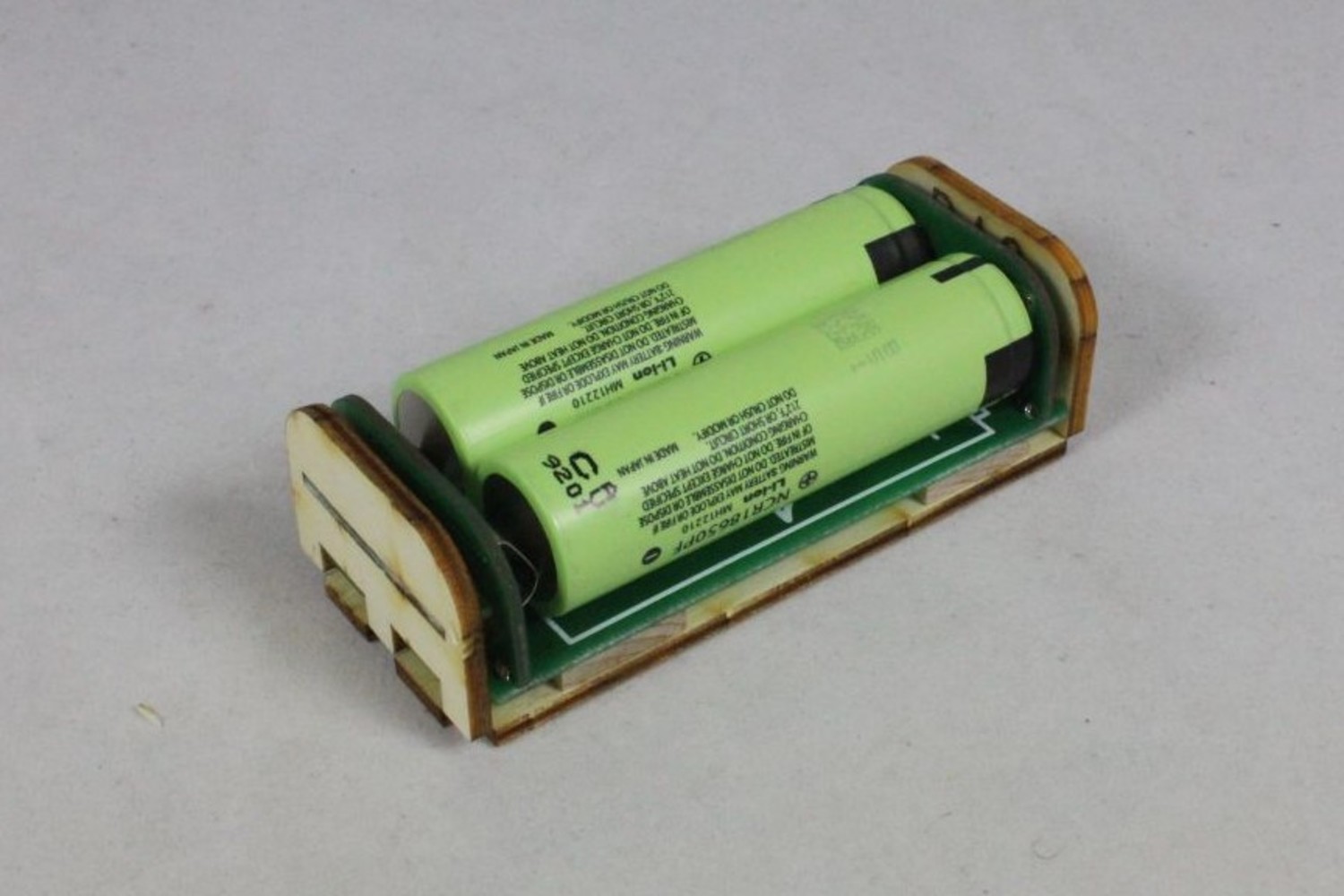
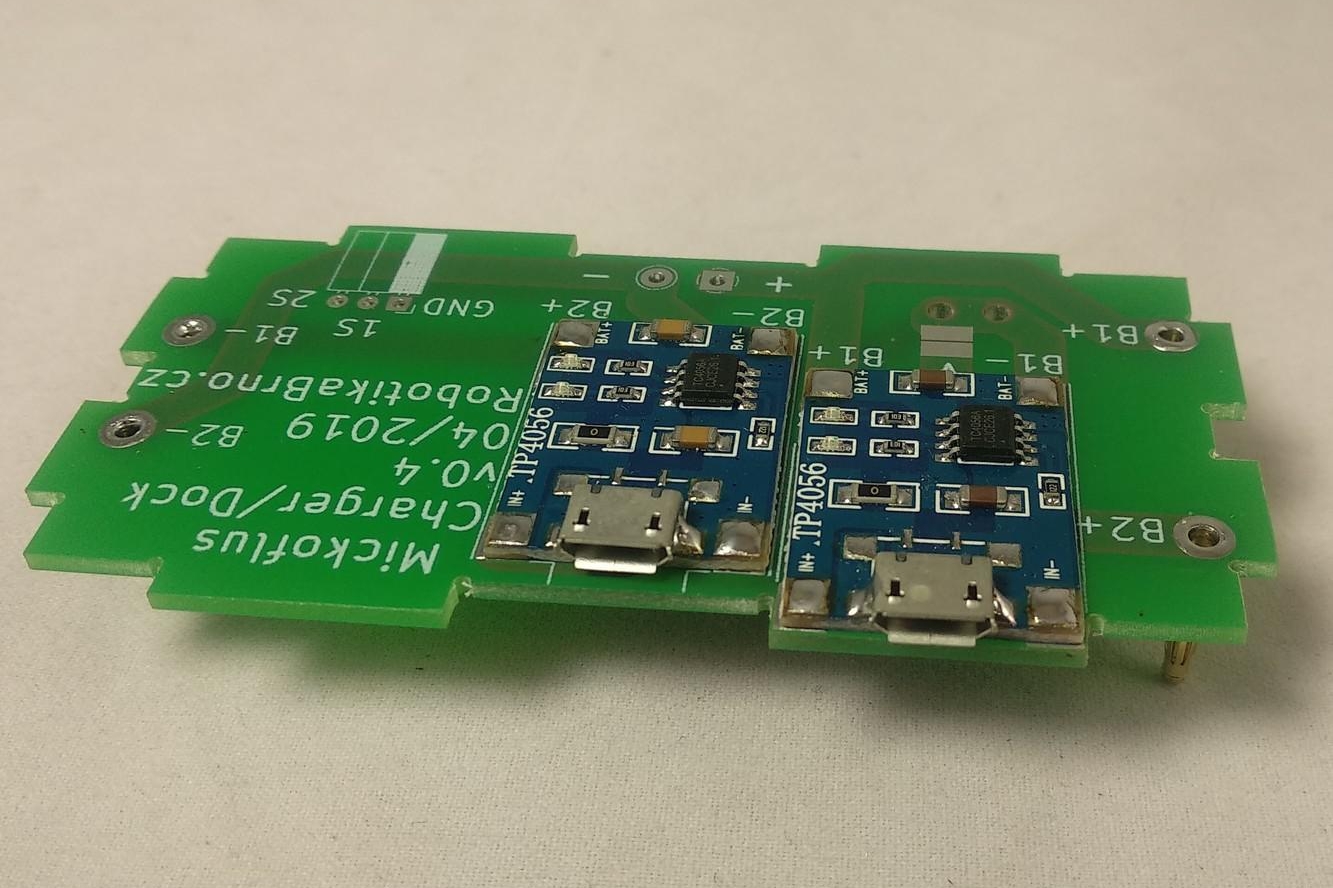
Robot je napájen z našeho baterry packu, který obsahuje dvě 18650 li-ion baterie. Rám packu tvoří plošný spoj do kterého jsou připájeny kontakty na baterie a výstupní piny. Pro nábíjení se využíva modul TP4056 s micro USB konektorem.


Dálkové ovládání
Robot jde ovládat přes univerzální mobilní aplikaci RBController která je k dispozici pro Android na Google play, nebo pro Windows na Githubu.


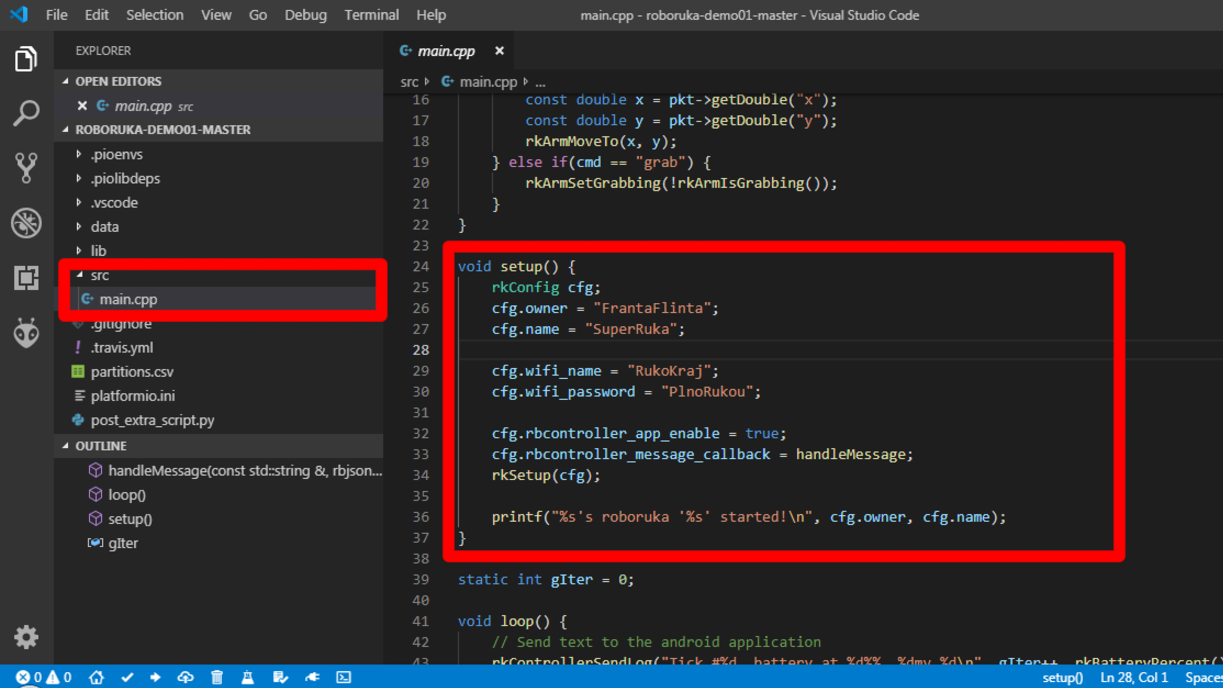
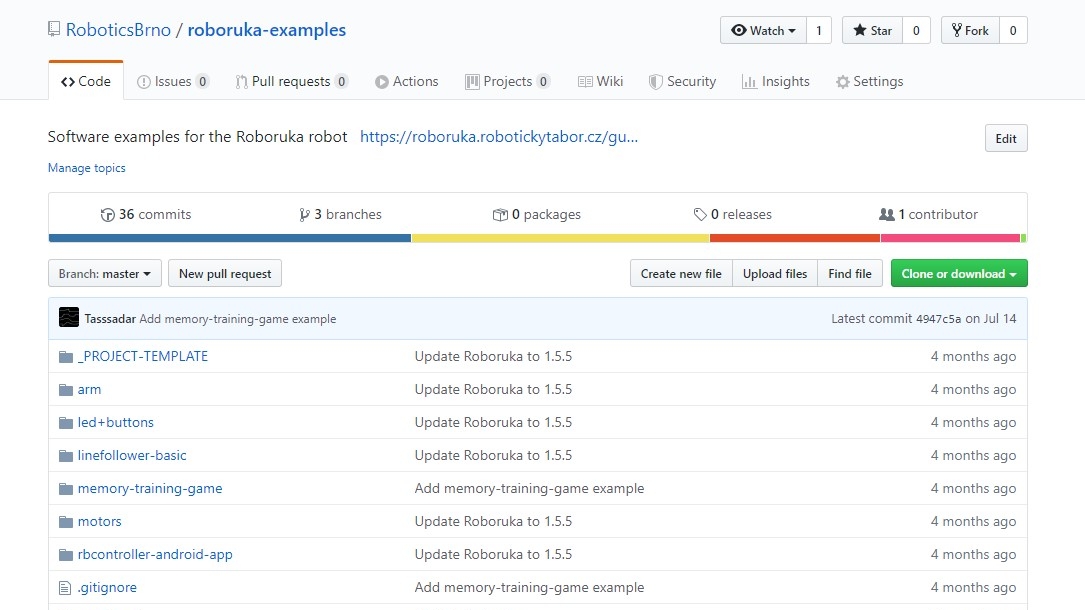
Programování
Software pro Roboruku je napsaný v C++ ve Visual Studiu. Pro řízení desky RBController je vytvořená knihovna RB3201-RBControl-library, na které je postavena knihovna RB3201-RBControl-Roboruka-library která zjednodušuje programování Roboruky. Příklady práce s knihovnou a testovací programy naleznete na Githubu.
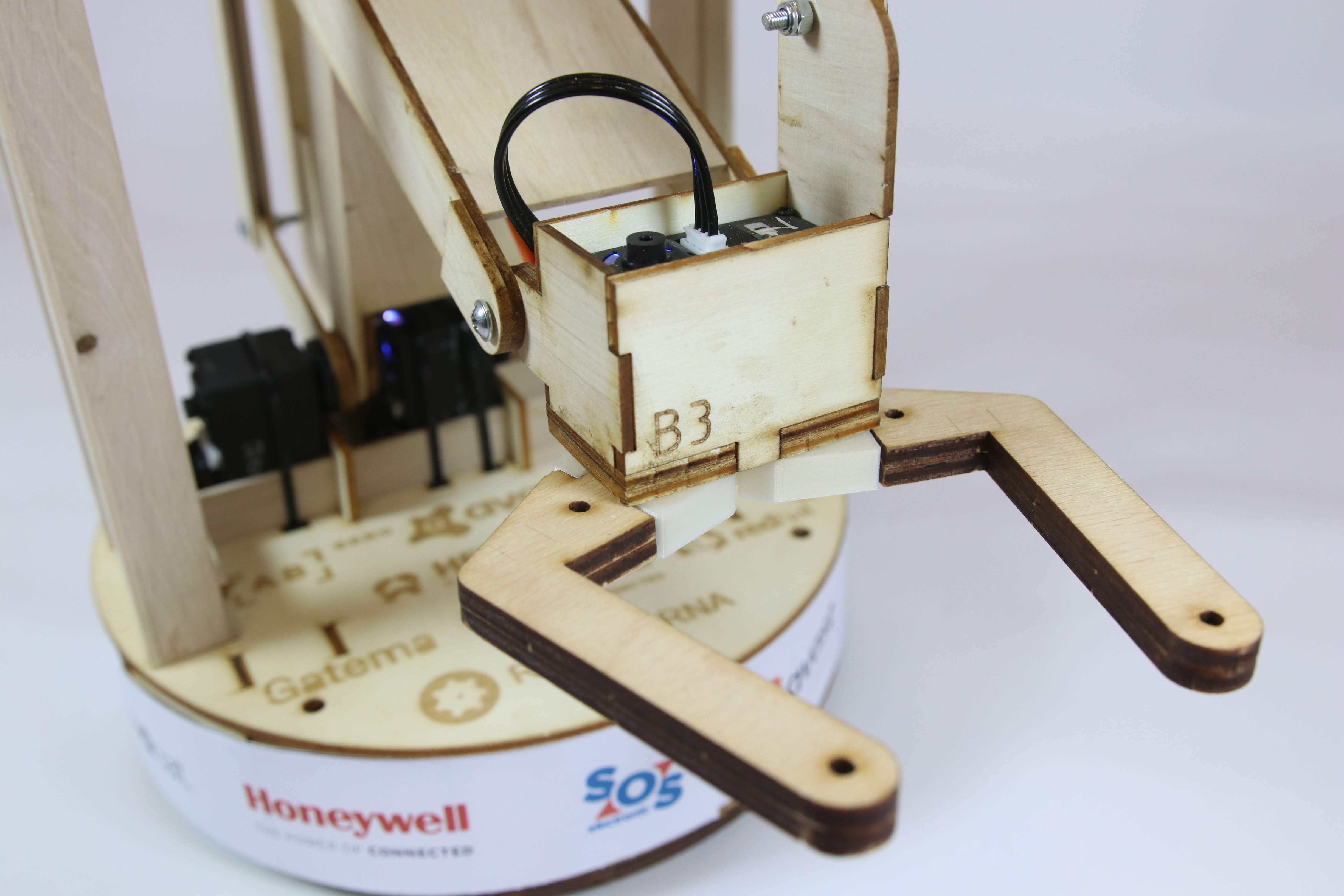
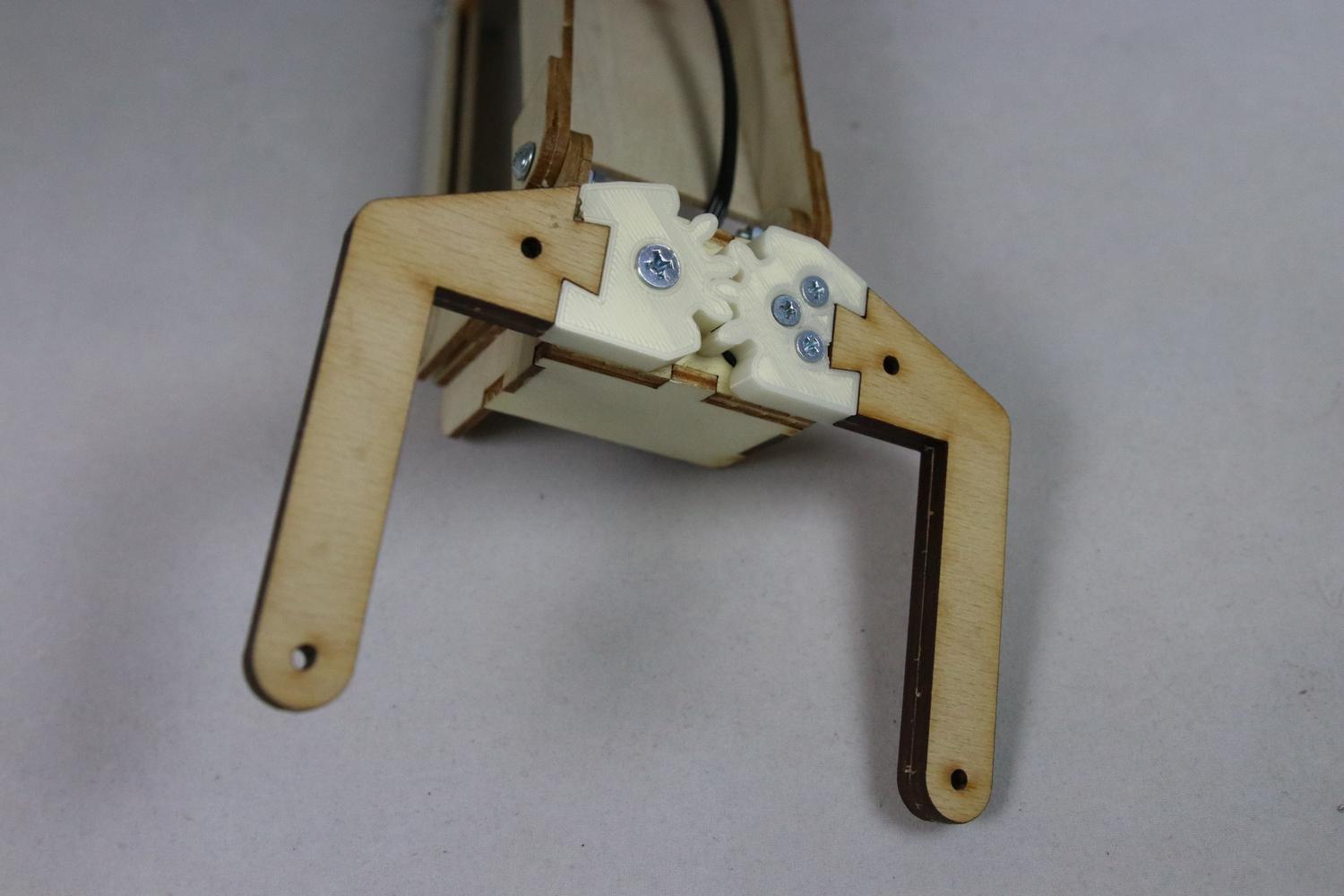
Rameno a klepeto
Konstrukce ramene je navržená tak, aby při pohybu objekt v klepetech dobře držel a jednoduše se s ním manipulovalo. Pro přesný pohyb ramene využíváme dvě inteligentní serva, třetí zajišťuje otevírání klepete.
Senzorická lišta
Na podvozek robota je připojena senzorická lišta s 8 senzory, pomocí které robot může jezdit po čáře, nebo po barevném rozhraní. Lišta s řídící deskou komunikuje přes sběrnici SPI. Knihovna pro senzorickou lištu.

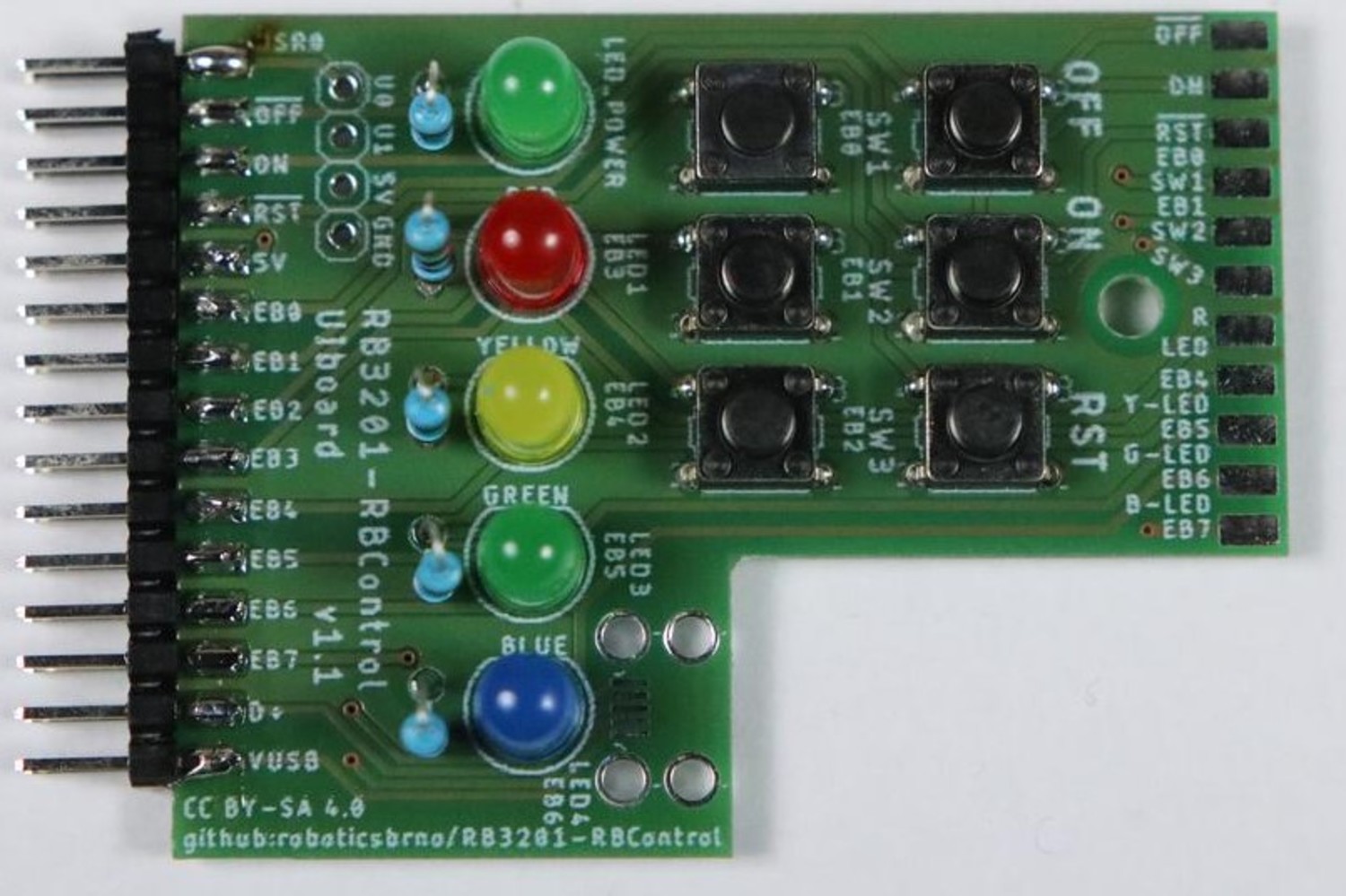
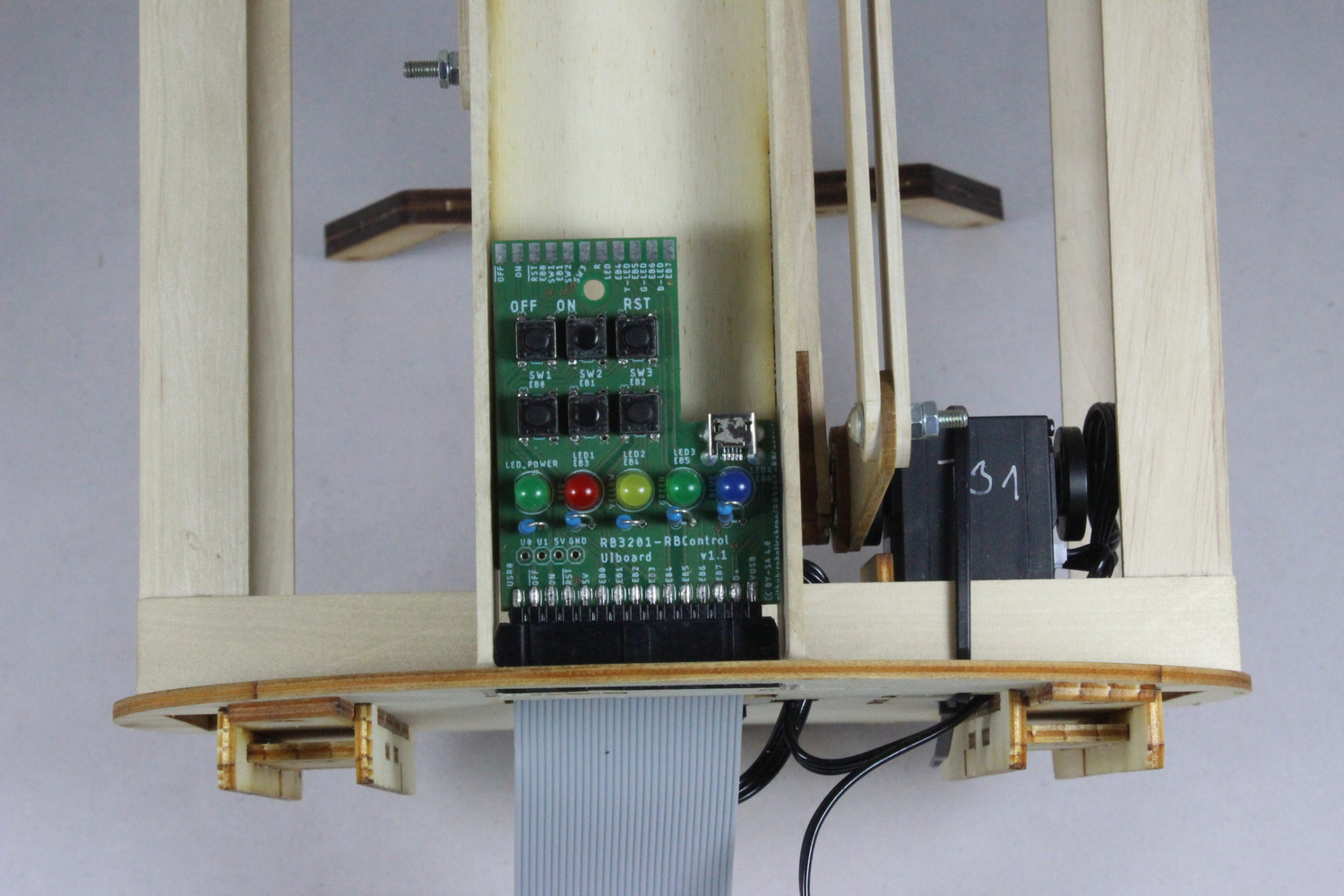
UI Board
Rozšíření řídicí desky. Pomocí této desky jde robot programovat bez nutnosti otevření , zapínat/vypínat, ovládat tlačítka, atd.